感知多(duō)维新(xīn)视界
公司搭建起多(duō)品类矩阵布局:拥有(yǒu)工业级面阵光场相机VA2、VA6等系列产品; 科(kē)研级面阵光场相机VE3、VE4、VE5等系列产品,同时超景深光场相机、超级分(fēn)光光场相机、超级变倍光场相机以及線(xiàn)扫光场相机相关體(tǐ)系产品即将上市
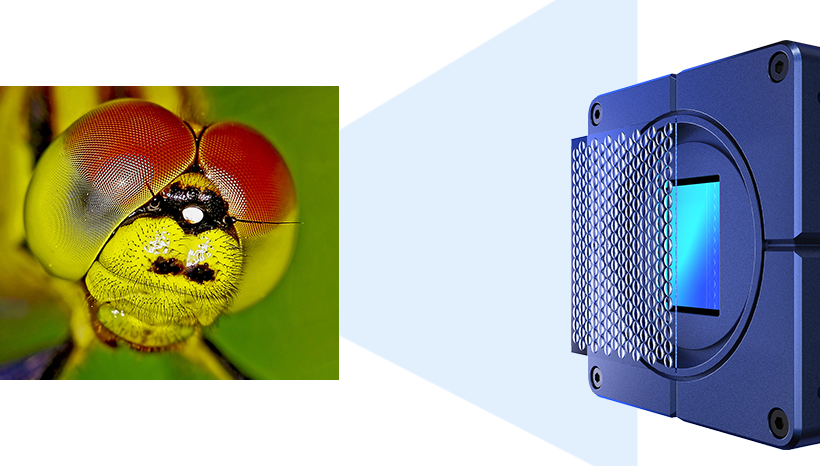
原理(lǐ)介绍
奕目光场相机通过数百万颗微小(xiǎo)透镜阵列来模拟昆虫复眼,每个透镜都代表一个独立子视角,数百万个不同视角赋予了光场相机媲美昆虫精准感知物(wù)體(tǐ)三维信息的能(néng)力。

光场相机特点
光场相机被动式光學(xué)测量,无需主动投光和机械位移机构,单台设备单次拍摄,50毫秒(miǎo)内便可(kě)三维成像。数百至数千万个复眼透镜单元从多(duō)个视角同时对目标成像,密集的光场空间采样能(néng)力,使得三维测量精度最高可(kě)达800纳米。 “先拍摄、后任意聚焦”、“数百个不同视角图像同时获取”,可(kě)以在目标物(wù)有(yǒu)遮挡、材质反光、空间狭小(xiǎo)、孔洞深宽比大等特殊工况下三维成像,有(yǒu)着常规三维视觉方案无法替代的优势。
软件算法特点
在光场算法层面,奕目研发团队投入了大量的时间,从2012年开始于上海交通大學(xué)期间就开始进行光场深度计算、光场渲染算法、光场校准和尺度标定算法的研发和迭代。发表几十篇國(guó)际论文(wén)和专利、英文(wén)著作。并且于2018年获得國(guó)际光场排行榜4D Light Field Benchmark中发布VOMMAnet荣获世界第一。相关成果支持了多(duō)项國(guó)家自然科(kē)學(xué)基金项目和重大专项的研究。

科(kē)技有(yǒu)限公司")
 返回顶部
返回顶部 联系方式
联系方式
 产品选型
产品选型

